
摘 要:為了實現(xiàn)小型無人傾轉(zhuǎn)旋翼機螺旋槳的可靠驅(qū)動,以ADuC7060 微控制器為核心,采用反電勢法設計了一種無位置傳感器無刷直流電機驅(qū)動器。利用mosFET 作為開關(guān)器件,給出了橋式逆變電路和位置檢測電路的原理圖。針對螺旋槳負載的特點,利用MATLAB 優(yōu)化了三段式起動方法的起動加速曲線,并對轉(zhuǎn)子位置檢測電路中濾波電容產(chǎn)生的相移進行了補償。通過調(diào)試表明,無刷直流電機能夠帶載可靠起動,并通過PWM 平穩(wěn)調(diào)速,驗證了設計的有效性。
1. 引言
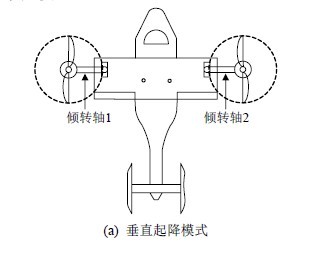
傾轉(zhuǎn)旋翼機是一種集固定翼飛機和直升機優(yōu)點于一身的新型飛行器。通過傾轉(zhuǎn)軸帶動螺旋槳的傾轉(zhuǎn),傾轉(zhuǎn)旋翼機可以實現(xiàn)垂直起降和水平飛行兩種模式的切換,因此與傳統(tǒng)飛機相比,傾轉(zhuǎn)旋翼機具有機動性強、載重量大、可垂直起降等優(yōu)點[1]。近年來對傾轉(zhuǎn)旋翼機的研究已經(jīng)成為航空領(lǐng)域的新熱點。目前,國內(nèi)已經(jīng)有研究機構(gòu)開始試制小型樣機,并對傾轉(zhuǎn)旋翼機控制系統(tǒng)進行分析[2]。本文在制作了小型無人傾轉(zhuǎn)旋翼機結(jié)構(gòu)的基礎(chǔ)上,根據(jù)旋翼機的設計需求,選用運行可靠、電磁噪聲小的無刷直流電機作為驅(qū)動電機,并采用ADuC7060 單片機為控制芯片,對傾轉(zhuǎn)旋翼機的驅(qū)動系統(tǒng)進行了設計。
2. 傾轉(zhuǎn)旋翼機系統(tǒng)結(jié)構(gòu)
傾轉(zhuǎn)旋翼機的結(jié)構(gòu)如圖1 所示,分為垂直起降模式和水平飛行模式。系統(tǒng)采用ADXRS612 陀螺儀和ADIS16210 加速度計作為傳感器,為控制器提供位置姿態(tài)信號,在負反饋機制作用下,驅(qū)動執(zhí)行器進行姿態(tài)調(diào)節(jié)。以垂直起降模式為例,當兩傾轉(zhuǎn)軸同向轉(zhuǎn)動時,就可以實現(xiàn)俯仰姿態(tài)的調(diào)節(jié);當兩傾轉(zhuǎn)軸反向轉(zhuǎn)動時,就會為機體提供一個扭矩,實現(xiàn)偏航姿態(tài)的調(diào)節(jié);而當左右兩個電機轉(zhuǎn)速差動時,就實現(xiàn)滾轉(zhuǎn)姿態(tài)的調(diào)節(jié)。可見,無刷直流電機的平穩(wěn)調(diào)速對旋翼機系統(tǒng)至關(guān)重要。
3. 無刷直流電機的驅(qū)動策略
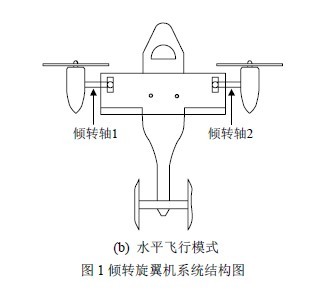
本設計中采用反電勢法無位置傳感器無刷直流電機驅(qū)動策略。反電勢法不需要借助位置傳感器,僅通過檢測反電勢信號就可以判斷轉(zhuǎn)子位置,具有結(jié)構(gòu)簡單、可靠性高等優(yōu)點[3,4]。如圖2 所示,為A 相繞組的反電勢在一個電周期內(nèi)的波形,其中橫軸代表當前運行時刻的電角度,縱軸代表A 相繞組產(chǎn)生的反電勢Ea。從圖中可以看出,當檢測到反電勢信號過零點后,延遲30°電角度即是換相點。對于三相繞組電機,每隔60°電角度就會產(chǎn)生一個反電勢過零點,過零點信號被ADuC7060 微控制器檢測并處理后,就可以產(chǎn)生相應的驅(qū)動信號驅(qū)動電機連續(xù)運轉(zhuǎn)。
4. 無刷直流電機驅(qū)動系統(tǒng)硬件設計
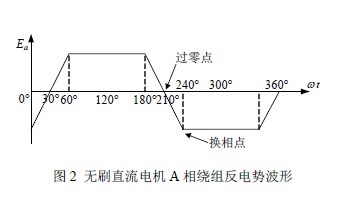
本系統(tǒng)采用電壓為12 V 的模型動力電池供電。硬件連接框圖如圖3 所示,ADuC7060 微控制器通過I2C接口接收來自主控制器發(fā)送的控制信號,根據(jù)轉(zhuǎn)速要求改變PWM 占空比,并實時檢測反電勢過零信號,進而通過橋式逆變電路驅(qū)動電機調(diào)速。為了保證運行安全,系統(tǒng)中還利用采樣電阻設計了欠壓/過流檢測電路,以便在電池欠壓和電機堵轉(zhuǎn)過流時為系統(tǒng)提供保護。下面將對主要單元電路分別進行介紹。
4.1 微控制器的選擇
本設計中微控制器采用的是ADI 公司生產(chǎn)的ADuC7060 單片機。ADuC7060 采用ARM7TDMI 內(nèi)核,其內(nèi)部集成了一個三相PWM 接口,16 個通用I/O 端口,兩個獨立的多通道24 位Σ-ΔADC,以及通用定時器和I2C 串行接口等資源,性能十分優(yōu)越。當工作在10.24 MHz 時,其功耗一般僅為25 mW,滿足模型機系統(tǒng)對低功耗的要求。
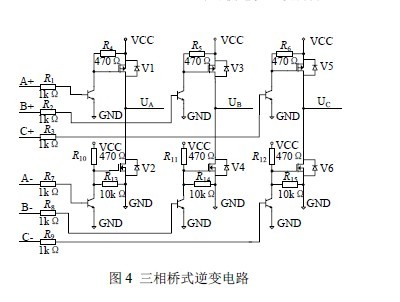
4.2 三相橋式驅(qū)動電路
在本系統(tǒng)中,逆變電路為三相橋式結(jié)構(gòu),采用上橋臂單邊PWM 控制。如圖4 所示,圖中V1~V6 為功率MOSFET,上橋臂選用型號為IRFR5305 的P 溝道功率MOSFET,當PWM 輸出高電平時導通;下橋臂選用型號為IRFR1205 的N溝道功率MOSFET,當I/O 端口輸出低電平時導通。在每個功率MOSFET 的前端都放置了一個三極管,目的是提高微控制器端口的驅(qū)動能力,保證MOSFET 的可靠開關(guān)。在一個電周期內(nèi), 控制導通相序為AB→AC→BC→BA→CA→CB,即可使電機連續(xù)旋轉(zhuǎn)。
4.3 反電勢過零檢測電路
反電勢檢測電路如圖5 所示,UA、 UB 和 UC 與電機繞組引出端連接,經(jīng)過分壓網(wǎng)絡后得到分壓點CMPA、CMPB 和 CMPC,圖中電容起濾波作用。同時圖中電阻構(gòu)成了一個星型網(wǎng)絡,電路中NULL 點可以用來虛擬中性點。這樣只要利用比較器成對比較分壓點與虛擬中性點電壓,即可檢測反電勢信號的過零點。

5. 無刷直流電機驅(qū)動系統(tǒng)軟件設計
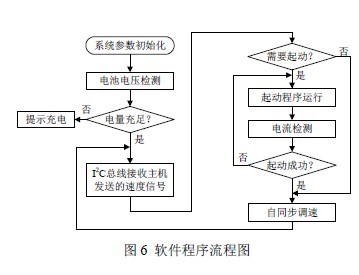
無刷直流電機驅(qū)動系統(tǒng)軟件流程如圖6 所示,主要分為起動和調(diào)速兩部分。由于電機轉(zhuǎn)速與螺旋槳升力之間難以建立精確關(guān)系[5],所以設計中不對電機本身單獨進行閉環(huán)控制,而是根據(jù)陀螺儀提供的反饋信號,對旋翼機整體進行閉環(huán)控制。當旋翼機控制器發(fā)出速度信號后,由ADuC7060 微控制器I2C 總線接收。如果速度信號從零開始增大,則需要進行起動,否則跳過起動程序,直接根據(jù)速度信號改變PWM 的占空比,調(diào)節(jié)螺旋槳的轉(zhuǎn)速。
5.1 無刷直流電機的起動
反電勢信號在電機靜止或低速時難以檢測,因而電機起動時無法利用反電勢信號自主換相。本文采用“三段式起動”法進行起動設計,它分為預定位、外同步加速、運行狀態(tài)切換三個階段[6]。首先給任意兩相繞組通電一段時間,使轉(zhuǎn)子定位到已知的位置,然后利用微控制器產(chǎn)生頻率逐漸提高的驅(qū)動信號,使電機以類似步進電機的方式加速,待轉(zhuǎn)速達到可以產(chǎn)生清晰的反電勢信號后再切換到自同步運行狀態(tài)。“三段式起動”法的關(guān)鍵是保證外同步加速和切換時不產(chǎn)生失步。針對外同步加速過程,通常采用升壓升頻加速或恒壓升頻加速方式。升壓升頻方式需兼顧PWM 占空比及換相時間間隔與換相次數(shù)的關(guān)系,對于螺旋槳這類變轉(zhuǎn)矩負載較難進行優(yōu)化設計。本文采用恒壓升頻方式設計了一種針對螺旋槳負載的加速曲線。考慮到對于電機系統(tǒng)有:

式中J 是系統(tǒng)的轉(zhuǎn)動慣量;θ 為轉(zhuǎn)子轉(zhuǎn)過的電角度;Tem 為電磁轉(zhuǎn)矩(與電樞電流成正比);T0 為空載阻轉(zhuǎn)矩;TL 為負載轉(zhuǎn)矩。在加速階段,一方面由于螺旋槳負載轉(zhuǎn)矩TL 隨轉(zhuǎn)速升高而增加;另一方面隨著轉(zhuǎn)速增加反電勢也增加,導致電樞電流降低引起Tem 減小,所以加速過程中應保證角加速度減小,才能使式(1)平衡。本設計中,結(jié)合實驗調(diào)試,利用MATLAB擬合了一條冪函數(shù)加速曲線,如圖7 所示,其中橫軸代表換相次數(shù)N(由于每次換相轉(zhuǎn)過60°電角度,故N正比于θ ),縱軸為換相時間間隔Δt 。
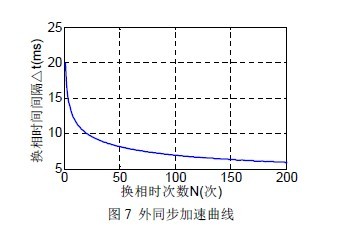
下面簡單介紹一下擬合方法,為簡便起見,選取三個待擬合的點。根據(jù)這三個點的特點,不妨分別稱它們?yōu)槠鹗键c、轉(zhuǎn)折點和切換點,其中從起始點到轉(zhuǎn)折點之間要求快速加速,保證起動速度;在轉(zhuǎn)折點之后曲線應平緩,減小波動以便于平穩(wěn)切換到自同步運行,切換點的選取應以能產(chǎn)生清晰的反電勢信號為準。根據(jù)調(diào)試實驗,固定PWM 占空比為15%,選取起始點、轉(zhuǎn)折點和切換點坐標分別為(0,20)、(100,7.3)及(200,6),括號中第一個元為換相次數(shù)N,單位為次;第二個元為換相時間間隔Δt ,單位為毫秒。擬合的冪函數(shù)曲線表達式如式(2)所示。
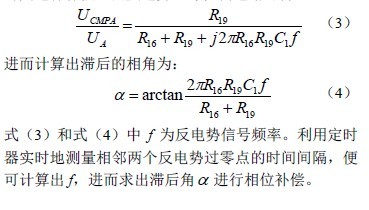
5.2 電容滯后換相的補償
由于反電勢過零檢測電路中存在濾波電容,這會導致自同步運行階段檢測到的位置信號滯后于實際位置信號。為確保電機準確換相,需計算出滯后時間并對其進行補償。由反電勢過零檢測電路可得:
6. 實驗調(diào)試與分析
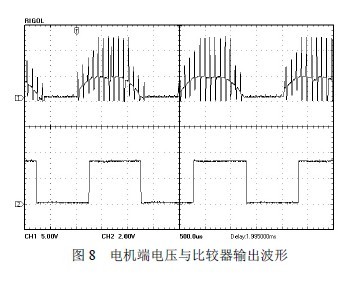
實驗電機采用XXD2212 型外轉(zhuǎn)子無刷直流電機,其額定電壓為12 V,最高空載轉(zhuǎn)速為12000 r/min。螺旋槳采用GF1045 高速槳。經(jīng)反復實驗,電機可以成功帶載起動。圖8 是調(diào)節(jié)PWM 占空比為30%時,用RIGOL DS5202 型示波器測量的實驗波形,其中通道1為A 相端電壓波形,通道2 為A 相對應的比較器輸出波形,可見電機運轉(zhuǎn)平穩(wěn),調(diào)速性能良好。從圖中也可以看出,比較器提供的轉(zhuǎn)子位置信號略滯后于實際信號,驗證了相位補償?shù)谋匾浴?/p>
7. 結(jié)束語
本文采用反電勢法設計了小型傾轉(zhuǎn)旋翼無人機無刷直流電機驅(qū)動系統(tǒng),完成了硬件電路以及軟件的設計調(diào)試。通過實驗對電機起動加速曲線進行了擬合,并補償了濾波電容引起的相位滯后。調(diào)試結(jié)果表明,在負載為GF1045 螺旋槳條件下,該驅(qū)動器能驅(qū)動XXD2212 型無刷直流電機可靠起動,并能實現(xiàn)平穩(wěn)調(diào)速,滿足旋翼機的設計要求。
參考文獻
[1] Martin D M, Demo J G, Daniel C D. The history of the XV
215 tilt rotor research aircraft: from concept to flight [R].
NASA SP2200024517, 2000: 12299.
[2] 徐昊. 傾轉(zhuǎn)旋翼機姿態(tài)控制問題研究[D]. 哈爾濱: 哈爾
濱工業(yè)大學, 2011.
[3] SU G J, MCKEEVER J W. Low-cost Sensorless Control
of Brushless DC Motors with Improved Speed
Range[J].IEEE Trans. on Power Electronics, 2004, 19(2):
296-302.
[4] 吳紅星, 葉宇驕, 倪天, 等. 無刷直流電機轉(zhuǎn)子位置檢
測技術(shù)綜述[J]. 微電機, 2011, 44(8): 75-76.
[5] 孟磊, 蔣宏, 羅俊, 等. 四旋翼飛行器無刷直流電機調(diào)
速系統(tǒng)的設計[J]. 電子設計工程, 2011, 19(12): 95-96.
[6] 廖承喜, 朱志杰, 翁微. 無刷直流電機三段式自起動關(guān)
鍵技術(shù)研究[J]. 電力電子技術(shù), 2008, 42(5): 61-62.
作者簡介:
王巖,男,1988 年生,碩士研究生,主要研究方向:飛行器
控制
翟琨,女,1989 年生,碩士研究生,主要研究方向:電力電
子與電力傳動
葛文哲,男,1989 年生,碩士研究生,主要研究方向:電力
電子與電力傳動
羅晶,男,1963 年生,博士,副教授,主要研究方向:機電
控制,檢測技術(shù)
陳平,女,1963 年生,博士,副教





